Radar Sensor¶
See also
See the Python reference of this logic brick in KX_RadarSensor.
The Radar Sensor works much like the Near sensor, but only within an angle from an axis, forming an invisible cone with the top in the objects’ center and base at a distance on an axis. This sensor is useful for giving bots sight only in front of them, for example.
Note
Soft Bodies
The Radar sensor cannot detect soft bodies. This is a limitation in Bullet, the physics library used by the Game Engine.
Note
The Radar sensor can detect objects “through” other objects (walls, etc.).
Objects must have “Actor” enabled to be detected.
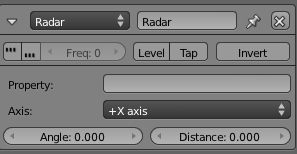
Radar sensor.¶
Properties¶
See Sensor Common Options for common options.
- Property
This field can be used to limit the sensor to look for only those objects with this property.
- Axis
This menu determines the direction of the radar cone. The ± signs is whether it is on the axis direction (+), or the opposite (-).
- Angle
Determines the angle of the cone.
- Distance
Determines the length of the cone. (Blender units).